import numpy as np
def rot2D(theta):
return np.array([[np.cos(theta), -np.sin(theta)],
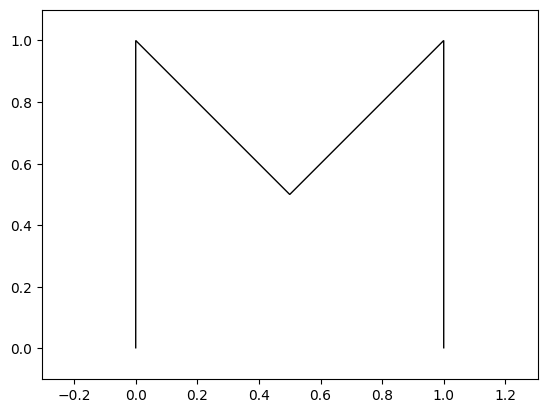
[np.sin(theta), np.cos(theta)]])Let’s construct an example, and then rotate it. We will write a letter M using 5 points and then rotate it.
import matplotlib.pyplot as plt
import matplotlib as mplb
# 5 corners of the letter M
path = np.array(
[[0, 0.],
[0, 1.],
[.5, .5],
[1., 1.],
[1., 0.]])
def plot_path(ax, path, m='k'):
ax.add_patch(mplb.patches.PathPatch(mplb.path.Path(path), fill=False, color=m))
# ax.set_xlim(-0.1, 1.1)
# ax.set_ylim(-0.1, 1.1)
ax.axis('equal')
return ax
fig, ax = plt.subplots()
plot_path(ax, path)
ax.set_xlim(-0.1, 1.1)
ax.set_ylim(-0.1, 1.1)(-0.1, 1.1)Ignoring fixed x limits to fulfill fixed data aspect with adjustable data limits.
R = rot2D(np.pi/6)
# the coordinates must be the column vectors in a matrix
# path contains coordinates as the row vectors.
# Transpose the path and take the transpose of the result
rotated_path = (R @ path.T).T
fig, ax = plt.subplots()
plot_path(ax, path, m='r')
plot_path(ax, rotated_path, m='g')
plt.show()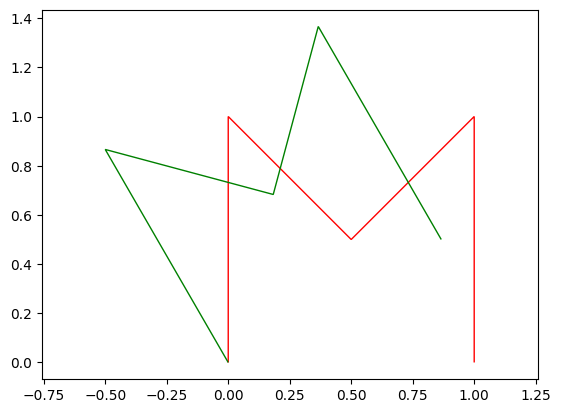
Can we rotate an image?¶
FILELOCATION = "umaine.png"
import urllib
with urllib.request.urlopen("https://raw.githubusercontent.com/wecacuee/gazebo_osm/1e7f7a5bfed1e9a1bd60848bbf15d16fc4b1ccbf/testFiles/umaine.png") as uf:
with open("umaine.png", "wb") as wf:
wf.write(uf.read())
import matplotlib.pyplot as plt
im = plt.imread("umaine.png")plt.imshow(im)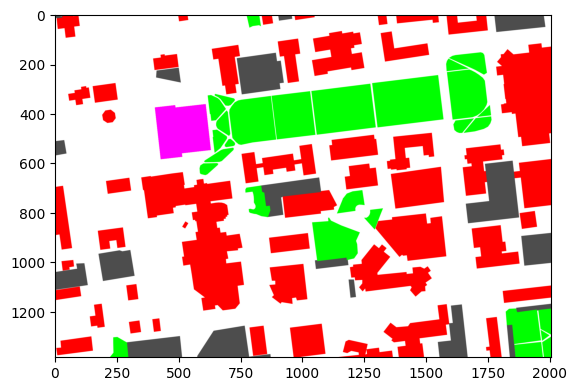
import numpy as np
# Generate a grid of all coordinates in the image
x, y = np.mgrid[0:im.shape[1], 0:im.shape[0]]R = rot2D(np.pi/6)# Concatenate x, y coordinates along the last axis to form vectors
p = np.concatenate((x[..., None], y[..., None]), axis=-1)# Handle np.matmul quirkiness for matrix vector multiplication, but for
# all points in the grid.
rotp = (R @ p[..., None])[..., 0]# Convert the points to nearest integer
rotpi = np.round(rotp).astype('i8')
# Separate x and y
rx = rotpi[..., 0]
ry = rotpi[..., 1]# make the image slightly bigger to account for the roatated image
rotim = np.zeros((3*im.shape[0]//2, 3*im.shape[1]//2, im.shape[2]))
# Convert x, y to row, col
rr = rotim.shape[0]-ry-1
rfilter = (0 <= rr) & (rr < rotim.shape[0])
rc = rx
cfilter = (0 <= rc) & (rc < rotim.shape[1])
inbounds = rfilter & cfilter
# Generate image within the same bounds
rotim[rr[inbounds], rc[inbounds], :] = im[im.shape[0]-y[inbounds]-1, x[inbounds], :]plt.imshow(rotim)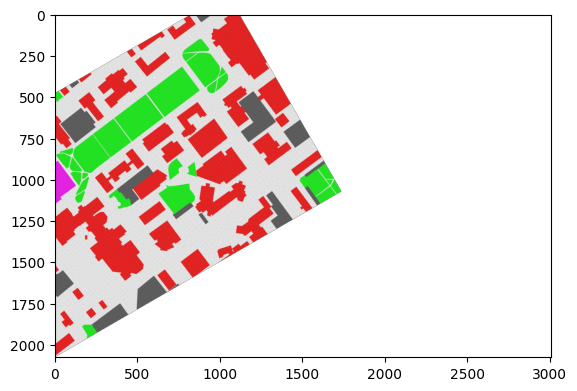
How to rotate around center then?¶
Create a new coordinate frame at the center of the object, rotate the coordinates in the new coordinate frame then translate back to the original coordinate frame.
def rot2D_around_center(R, points):
tcenter = np.mean(points, axis=-2, keepdims=True)
return (R @ (points - tcenter)[..., None] + tcenter)[..., 0]rotpath = rot2D_around_center(rot2D(np.pi/6), path)
fig, ax = plt.subplots()
plot_path(ax, rotpath)<Axes: >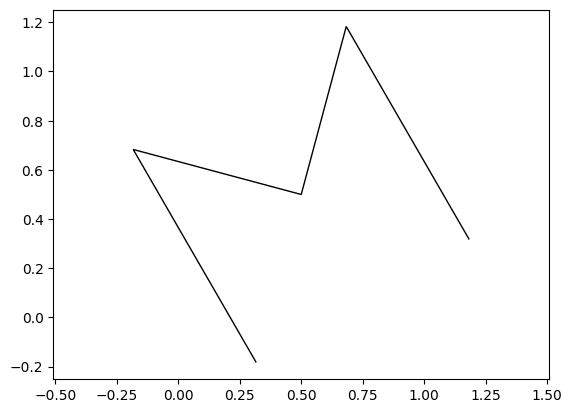
rotp = rot2D_around_center(rot2D(np.pi/6), p.reshape(-1, 2)).reshape(*p.shape)# Convert the points to nearest integer
rotpi = np.round(rotp).astype('i8')
# Separate x and y
rx = rotpi[..., 0]
ry = rotpi[..., 1]# make the image slightly bigger to account for the roatated image
rotim = np.zeros((3*im.shape[0]//2, im.shape[1], im.shape[2]))
# Convert x, y to row, col
rr = rotim.shape[0]-ry-1
rfilter = (0 <= rr) & (rr < rotim.shape[0])
rc = rx
cfilter = (0 <= rc) & (rc < rotim.shape[1])
inbounds = rfilter & cfilter
# Generate image within the same bounds
rotim[rr[inbounds], rc[inbounds], :] = im[im.shape[0]-y[inbounds]-1, x[inbounds], :]plt.imshow(rotim)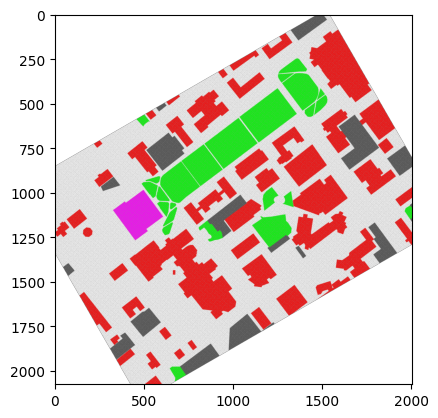
3D Rotation demo¶
We are going to use plotly for 3D rotation demo. Matplotlib has support for 3D plots, but it is not as cool as plotly. Documentation here :
https://
!pip install -U pip plotlyRequirement already satisfied: pip in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (25.2)
Collecting pip
Downloading pip-25.3-py3-none-any.whl.metadata (4.7 kB)
Requirement already satisfied: plotly in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (6.3.1)
Requirement already satisfied: narwhals>=1.15.1 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from plotly) (2.3.0)
Requirement already satisfied: packaging in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from plotly) (25.0)
Downloading pip-25.3-py3-none-any.whl (1.8 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 1.8/1.8 MB 17.7 MB/s 0:00:00
Installing collected packages: pip
Attempting uninstall: pip
Found existing installation: pip 25.2
Uninstalling pip-25.2:
Successfully uninstalled pip-25.2
Successfully installed pip-25.3
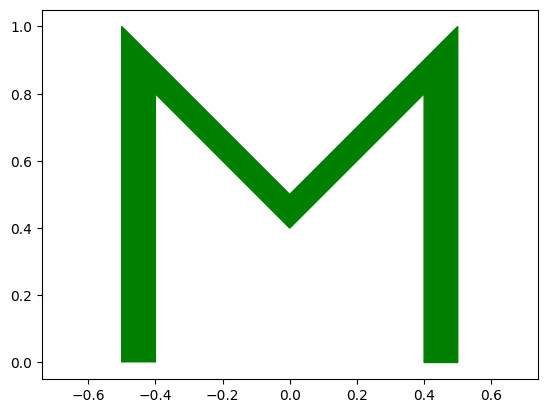
Let’s make a 3D M out of points and triangles. But before we make M 3D, we need to make M thik in 2D.
import matplotlib.pyplot as plt
import matplotlib as mplb
import numpy as np
# 5 corners of the letter M
path = np.array(
[[0, 0.],
[0, 1.],
[.5, .5],
[1., 1.],
[1., 0.]])
path -= np.array([0.5, 0.]) # Shift M so that the center is at middle of M
npts = path.shape[0] # How many points?
filled_path_for_M = np.zeros((2*npts, 2))
filled_path_for_M[:npts, :] = path # Copy first set of points
filled_path_for_M[npts:, :] = 0.8*path[::-1] # Copy second set of points but reversed
print(filled_path_for_M)
fig, ax = plt.subplots()
ax.add_patch(mplb.patches.PathPatch(mplb.path.Path(filled_path_for_M), fill=True, color='g'))
ax.set_xlim(-0.6, 0.6)
ax.set_ylim(-0.1, 1.1)
ax.axis('equal')
plt.show()
[[-0.5 0. ]
[-0.5 1. ]
[ 0. 0.5]
[ 0.5 1. ]
[ 0.5 0. ]
[ 0.4 0. ]
[ 0.4 0.8]
[ 0. 0.4]
[-0.4 0.8]
[-0.4 0. ]]
import plotly.graph_objects as go
path3D = np.zeros((4*npts, 3)) # extend the path to 3D with 4 times the points
# We will have 2 copies of filled_path_for_M
# Copy 1: with z = 0 and original X, Y
# Copy 2: with z = 0.1 and original X, Y
path3D[:2*npts, :2] = filled_path_for_M # copy the 2D points
path3D[:2*npts, 2] = 0 # make z coordinate zero for first set of points
# Copy 2: with z = 0.1 and original X, Y
path3D[2*npts:, :2] = filled_path_for_M # copy the 2D points another time
path3D[2*npts:, 2] = 0.1 # make z coordinate 0.1 for second set of points
# We will need a lot of triangles
pointids = np.arange(path3D.shape[0], dtype='i8')
# Number of rects required for filling up M at z = 0
rects = np.zeros(((npts-1), 4), dtype='i8')
rects[:, 0] = pointids[:npts-1]
rects[:, 1] = pointids[1:npts]
rects[:, 2] = pointids[2*npts-2:npts-1:-1]
rects[:, 3] = pointids[2*npts-1:npts:-1]
# Number of rects required for filling up M at z = 0.1
pointids_z1 = pointids[2*npts:]
rects2 = np.zeros(((npts-1), 4))
rects2[:, 0] = pointids_z1[:npts-1]
rects2[:, 1] = pointids_z1[1:npts]
rects2[:, 2] = pointids_z1[2*npts-2:npts-1:-1]
rects2[:, 3] = pointids_z1[2*npts-1:npts:-1]
rects = np.vstack((rects, rects2))
# Number of rects required to connect lower M and upper M
rects3 = np.zeros((2*npts, 4), dtype='i8')
rects3[:, 0] = pointids[:2*npts]
rects3[:, 1] = pointids_z1
rects3[:, 2] = np.roll(pointids_z1, 1)
rects3[:, 3] = np.roll(pointids[:2*npts], 1)
rects = np.vstack((rects, rects3))
# Breakdown rects into triangles along the diagonal
nrects = rects.shape[0]
triangles = np.zeros((2*nrects, 3), dtype='i8')
triangles[:nrects, 0] = rects[:, 0]
triangles[:nrects, 1] = rects[:, 1]
triangles[:nrects, 2] = rects[:, 3]
triangles[nrects:, 0] = rects[:, 2]
triangles[nrects:, 1] = rects[:, 1]
triangles[nrects:, 2] = rects[:, 3]
fig = go.Figure(
layout=go.Layout(
xaxis=dict(range=[-1, 1], autorange=False),
yaxis=dict(range=[-1, 1], autorange=False)
),
data=[
go.Mesh3d(
# 10 vertices of a M
x=path3D[:, 0],
y=path3D[:, 1],
z=path3D[:, 2],
# colorbar_title='z',
colorscale=[[0, 'gold'],
[0.5, 'mediumturquoise'],
[1, 'magenta']],
# Intensity of each vertex, which will be interpolated and color-coded
intensity = np.linspace(0, 1, triangles.shape[0], endpoint=True),
intensitymode='vertex',
i=triangles[:, 0],
j=triangles[:, 1],
k=triangles[:, 2],
name='y',
showscale=True
),
]
)
fig.show()Loading...
def cross_prod(k):
return np.array([[ 0, -k[2], k[1]],
[ k[2], 0, -k[0]],
[-k[1], k[0], 0]])
def rot3D(k, theta):
k = k / np.linalg.norm(k)
K = cross_prod(k)
return np.eye(3) + np.sin(theta) * K + (1-np.cos(theta)) * K @ K
k = np.array([1., 1, 0])3D animation using k3d¶
This does not work in Google Colab, but can work in binder:

!pip install -U k3dRequirement already satisfied: k3d in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (2.17.0)
Requirement already satisfied: deepcomparer in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from k3d) (0.4.0)
Requirement already satisfied: ipywidgets<9.0.0,>=7.0.0 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from k3d) (8.1.7)
Requirement already satisfied: msgpack in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from k3d) (1.1.2)
Requirement already satisfied: numpy in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from k3d) (2.2.6)
Requirement already satisfied: traitlets in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from k3d) (5.14.3)
Requirement already satisfied: traittypes in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from k3d) (0.2.1)
Requirement already satisfied: comm>=0.1.3 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipywidgets<9.0.0,>=7.0.0->k3d) (0.2.3)
Requirement already satisfied: ipython>=6.1.0 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipywidgets<9.0.0,>=7.0.0->k3d) (8.37.0)
Requirement already satisfied: widgetsnbextension~=4.0.14 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipywidgets<9.0.0,>=7.0.0->k3d) (4.0.14)
Requirement already satisfied: jupyterlab_widgets~=3.0.15 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipywidgets<9.0.0,>=7.0.0->k3d) (3.0.15)
Requirement already satisfied: decorator in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (5.2.1)
Requirement already satisfied: exceptiongroup in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (1.3.0)
Requirement already satisfied: jedi>=0.16 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (0.19.2)
Requirement already satisfied: matplotlib-inline in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (0.1.7)
Requirement already satisfied: pexpect>4.3 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (4.9.0)
Requirement already satisfied: prompt_toolkit<3.1.0,>=3.0.41 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (3.0.52)
Requirement already satisfied: pygments>=2.4.0 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (2.19.2)
Requirement already satisfied: stack_data in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (0.6.3)
Requirement already satisfied: typing_extensions>=4.6 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (4.15.0)
Requirement already satisfied: wcwidth in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from prompt_toolkit<3.1.0,>=3.0.41->ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (0.2.13)
Requirement already satisfied: parso<0.9.0,>=0.8.4 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from jedi>=0.16->ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (0.8.5)
Requirement already satisfied: ptyprocess>=0.5 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from pexpect>4.3->ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (0.7.0)
Requirement already satisfied: executing>=1.2.0 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from stack_data->ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (2.2.1)
Requirement already satisfied: asttokens>=2.1.0 in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from stack_data->ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (3.0.0)
Requirement already satisfied: pure-eval in /home/vdhiman/.local/venvs/ece490/lib/python3.10/site-packages (from stack_data->ipython>=6.1.0->ipywidgets<9.0.0,>=7.0.0->k3d) (0.2.3)
import k3d
import numpy as np
from k3d import matplotlib_color_maps
def rotated_points(k, theta, points):
return (rot3D(k, theta) @ points.T).T
k = np.array([0., 1., 0.])
plot = k3d.plot()
plot += k3d.line(vertices=np.vstack(([[0., 0., 0.]], k[None, :])).astype('f4'),
color=0xFF0000)
plt_mesh = k3d.mesh(vertices=path3D.astype('f4'), indices=triangles.astype('u4'),
opacity=0.75)
plot += plt_mesh
plot.display()
Loading...
k = np.array([1., 1., 0.]) # try variations of [1., 0., 0.], [0, 0, 1], [1, 1, 0], [0, 1, 1]
plot = k3d.plot()
plot += k3d.line(vertices=np.vstack(([[0., 0., 0.]], k[None, :])).astype('f4'),
color=0xFF0000)
plt_mesh = k3d.mesh(vertices=path3D.astype('f4'), indices=triangles.astype('u4'),
opacity=0.75)
plot += plt_mesh
plot.display()
plt_mesh.vertices = {str(t/10.): rotated_points(k, t*2*np.pi/99, path3D).astype('f4') for t in range(100)}
plot.start_auto_play()Loading...